
uProcesorové konstrukce

Díky tomu, že bydlím na malém městě a to v okrajové části již prakticky od malička se věnuji lovu myší. Začínal jsem s klasickou sklapovací pastí. Protože však ty běžně prodávané nebyly pro mne dost dobré, tak jsem si je začal upravovat. Později jsem je opustil pro jejich vysokou nespolehlivost a nízkou efektivitu. A protože považuji za krajně nesportovní používat nějaké jedy, postavil jsem si už možná před 20lety z Merkuru sklopec. První verze byla vybavena zcela mechanickou spouští, ale i tak sklopec vykazoval vysokou účinnost. Postupem času a jak jsem se začal zajímat o elektroniku, začal jsem i sklopec zdokonalovat a přidávat elektronické prvky. Prvním vylepšením bylo odporové snímání a elektrické vybavení spouště pomocí motoru. To fungovalo sice uspokojivě, ale jen za určitých klimatických podmínek a postupně se zanášely senzory a bylo nutné je stále čistit. Proto jsem od odporového snímání upustil a začal bádat co použít, ke snímání, že je myš uvnitř. První myšlenka padla na optickou závoru. Tato myšlenka byla ovšem okamžitě zavrhnuta z důvodu obrovské energetické náročnosti. Napájení mám řešeno z 9V baterie a na tuto baterii musí sklopec pracovat několik měsíců.
Průlomem se stalo snímaní pomocí PIR senzoru. Ten má spotřebu v řádu stovek uA a navíc je zcela bezkontaktní a může být umístěn vně sklopce. S tímto systémem pracoval sklopec dlouhé roky s prakticky 100% účinností. Poslední dobou však začal vykazovat problém mechanický mikrospínač, jež signalizoval aktivaci spouště a zároveň po zaklapnutí odpojil baterii, aby se šetřila energie. Sice jsem si sehnal nový mikrospínač, ale protože ten původní byl nestandardní musel by se náhradní složitě montovat. Takže jsem se rozhodl i tento mechanický prvek vypustit a navrhnout nové řízení.
A samozřejmě v dnešní době počítačů je takřka nemožné postavit něco, co by nebylo nějakým tím počítačem řízeno a tak i moje nová elektronika je řízena mikropočítačem. V následujícím článku najdete tuto konstrukci řízení. Avšak již v této chvíli pracuji na zcela novém systému, který bude mnohem chytřejší a propracovanější. Například můžu zmínit bezdrátový přenos informací, kontrola napájecího napětí ve třech stavech, vybavení pomocí serva, miniaturní provedení (SMD), napájení 4,5V (plochá baterie) a s tím souvisí spotřeba do 100uA.
Napájení: - 7-15V
Osběr proudu: - cca 3mA
Detekce myši: - Pir senzor (PIR modul)
Aktivace spouště: - Táhlo poháněné elektromotorem
Režim aktivace: - Pirem / Tlačítkem

Jak je ze schématu patrné, celá elektronika je značně jednoduchá díky použití procesoru PIC12F508. Na svorky X1 se přivede napájecí napětí. To je stabilizováno na 5V pro procesor a PIR podul. Svorkovnice X2 slouží pro připojení motoru, který vybavuje spoušť sklopce. Tento motor je spínán tranzistorem NPN Q1 (KC635). Zde je vhodné použít nějaký s proudem kolem 1A. Pak jsou zde 2 tlačítka. S1 je vlastně jen takové testovací, při jehož stisku dojde k aktivaci spouště sklopce (simulace aktivace PIR). S2 pak slouží k resetu procesoru a tím vvlastně k aktivaci celé pasti. A jako poslední je zde JP1, který slouží k připojení PIR modulu. Přičemž pin 1 je aktivní výstup z PIR modulu (Aktivní GND), pin 2 je kladné napájení PIR modulu a pin 3 je GND.
Málem bych zapoměl na LED1, která signalizuje jednotlivé stavy, ve kterých se sklopec momentálně nachází.
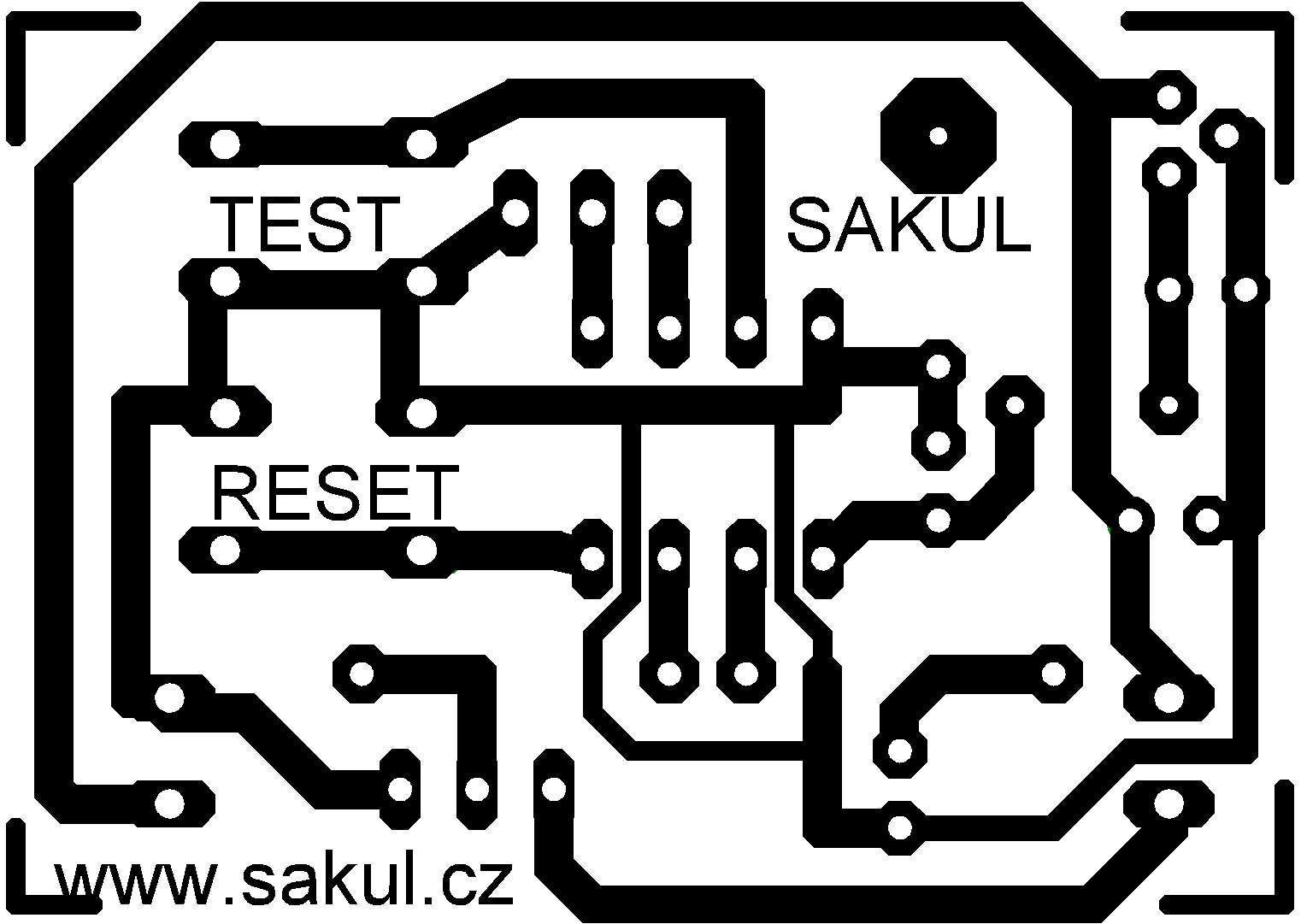

Plošný spoj je zhotoven na jednostranné desce o velikosti 43x30mm. Při osazování je nutné osadit jednu drátovou propojku. Samotné osazení by nemělo činit žádné potíže, jen je třeba si dát pozor na spoje tažené mezi vývody procesoru, aby nedošlo k nechtěným můstkům.
Funkce je celkem jasná z video ukázek, ale pro úplnost ji popíšu. Po přivedení napětí proběhne inicializace procesoru, což je signalizováno pěti krátkými záblesky LED1. Následně na to, je procesorem aktivován PIR modul. Pir modul má udáváno 30-60 sekund na ustálení a v této době není ještě aktivní. Na to je třeba myslet při testování. Jakmile je tedy vše aktivováno již se čeká na signál z PIR modulu nebo tlačítka S1. Mezitím je přibližně každých 10 sekund krátkým zábleskem LED1 signalizován stav pohotovosti.
Jakmile přijde signál od PIRu nebo S1 je aktivován po dobu 350ms Q1 a tím motor, který vybaví spoušť sklopce. Následně je odpojeno napájení PIRu a LED1 přibližně každých 10 sekund třemi krátkými záblesky signalizuje aktivaci sklopce. Sklopec je možno opětovně uvést do stavu pohotovosti stiskem S2, který provede reset procesoru.
Já jsem pro napájení použil malou gelovou baterii 12V/1,3Ah, na kterou dokáže sklopec pracovat několik týdnů.
Bohužel PIR modul, který jsem měl v této konstrukci od začátku použit, má napájecí napětí od 4,8V asi do 12V. Proto nebylo možné použít 4,5V z ploché baterie a tím vynechat stabilizátor napětí 78L05, který má v celém zapojení největší odběr cca 3mA, což je celkem šílená hodnota. Nicméně i tak se sklopec dá použít s baterií, 12V/1,3Ah. Také můj PIR modul má aktivní výstup v Log1 a proto bylo nutné ho otočit pomocí optočlenu.
V dnešní době se dají pořídit PIR moduly v ceně kolem 300Kč s napájecím napětím 2,5-5,5V a odběrem kolem 40uA, což je pro tuto konstrukci ideální. S takovímto modulem je možno vynechat stabilizátor a použít k napájení baterii 4,5V (plochá baterie) a odběr celého zařízení se podaří udržet někde na 450uA, což je už použitelná hodnota. S tímto řešením počítá druhá verze řízení.
Nyní ještě několik tipů na PIR moduly. Lze použít například ultraminiaturní provedení PSL31, které má napájení 3-5,5V a odběr 120uA, při rozměrech 14x15mm. Samozřejmě výstup je aktivní GND kompatibilní s tímto řízením. Nebo o něco větší provedení PM321 29x40mm s napětím 2,6-5V a proudu 35uA.
Nějaké PIR moduly je možno sehnat například zde: FLAJZAR
R1 - 5,6K
R2 - 1K
C1 - 100uF/10V
C2 - 100nF
C3 - 220uF/16V
LED1 - LED 3mm 2mA (červená)
IC1 - PIC12F508 (naprogramovaný)
IC2 - 78L05
S1,S2 - Mikro tlačítko do DPS
JP1 - Lámací jumper lišta 3piny
X1,X2 - Svorkovnice do DPS ARK550 2x2piny
No a na závěr si zde můžete stáhnout veškerou dokumentaci pro stavbu. Je zde i projekt pro Eagle.
DOWNLOAD - Včetně programu pro procesor
Diskusi pro tuto konstrukci najdete ZDE.
KONFIGURACE:
__CONFIG _MCLRE_ON & _CP_OFF & _WDT_OFF & _IntRC_OSC
Ještě jedna ukázka z vývoje této konstrukce:
Pokud Vás tato konstrukce zaujala nebo Vám dobře slouží, můžete ji podpořit volitelnou částkou. Stačí kliknout na tlačítko DONATE, zadat požadovanou částku, kterou chcete přispět na další rozvoj této a jiných konstrukcí, poté stiskněte Update Total a přihlaste se k odeslání příspěvku. Za jakékoli příspěvky předem děkuji a věřím, že zde najdete mnoho dalších zajímavých konstrukcí, které třeba vzniknou právě díky Vám.
Tato konstrukce je z mé hlavy a proto není povoleno bez mého souhlasu přejímání na jiné stránky nebo komerční využití. Je povoleno se pouze odkazovat na tento web a tuto konstrukci. Pro více informací mne stačí kontaktovat. Zároveň nepřebírám jakoukoli odpovědnost za chování zařízení a případné škody spůsobené použitím tohoto zařízení, ať by byly jakéhokoli rázu. Zařízení je určeno pouze k užití pro vlastní potřebu. V této konstrukci je použit program (program mikrokontroleru), na který se vztahují autorská práva. Na program je udělena zdarma licence na jeho užití pro vlastní potřebu. Jakýkoli prodej není bez souhlasu autora možný.
